Communication with CAN devices
Steps to bringup CAN communication on a 32-bit RISC-V CPU on Xilinx FPGA board Arty A7-100T.
- We would need to install a handful of very useful CANbus utilities for linux. This is packaged as can-utils for Linux.
Enable BR2_PACKAGE_CAN_UTILS=y in buildroot rootfs.
- We would also need iproute2 package to bringup CAN on Linux where it is treated as a network device.
Enable BR2_PACKAGE_IPROUTE2=y in buildroot rootfs.
- Once resulting rootfs is flashed to target, socketcan device can be brought up on Linux with 100 Kbit/s bitrate.
ip link set can0 type can bitrate 100000
ip link set up can0
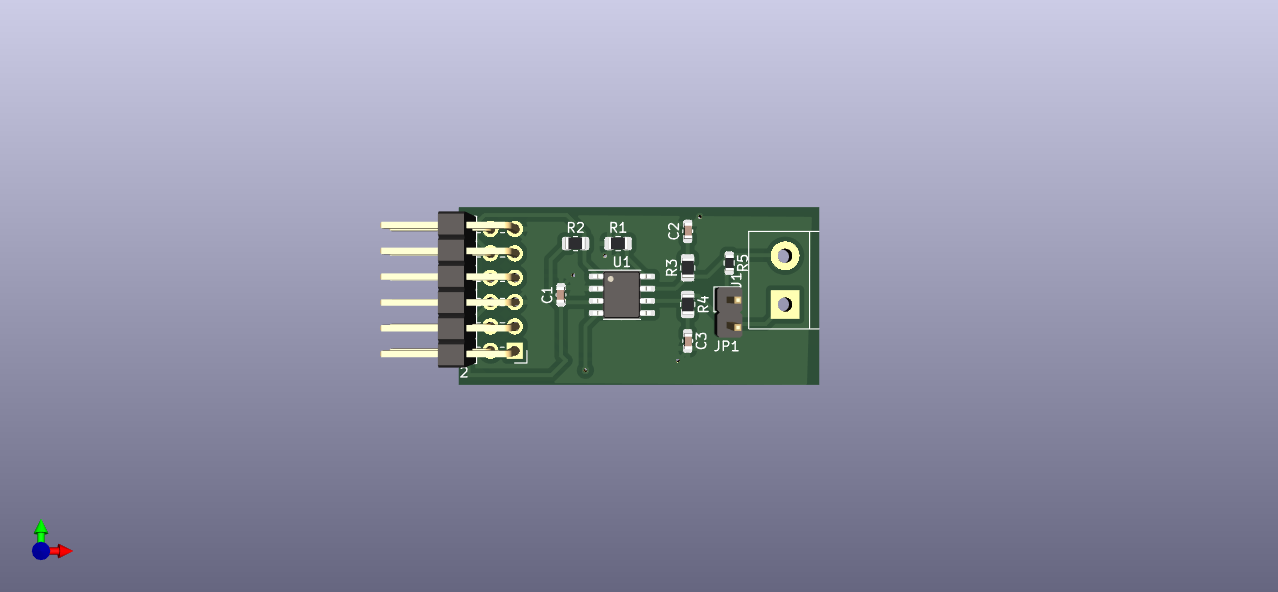
- Connect CAN Controller to CAN Transceiver PMOD
CAN Controller output pins are exposed on PMOD-C(JC) of Arty A7-100T board.
Connect CAN Transciever PMOD designed in this project, for easy connection to fpga board over PMOD-C(JC).
-
Connect a CAN device to other end of CAN Transciever PMOD.
-
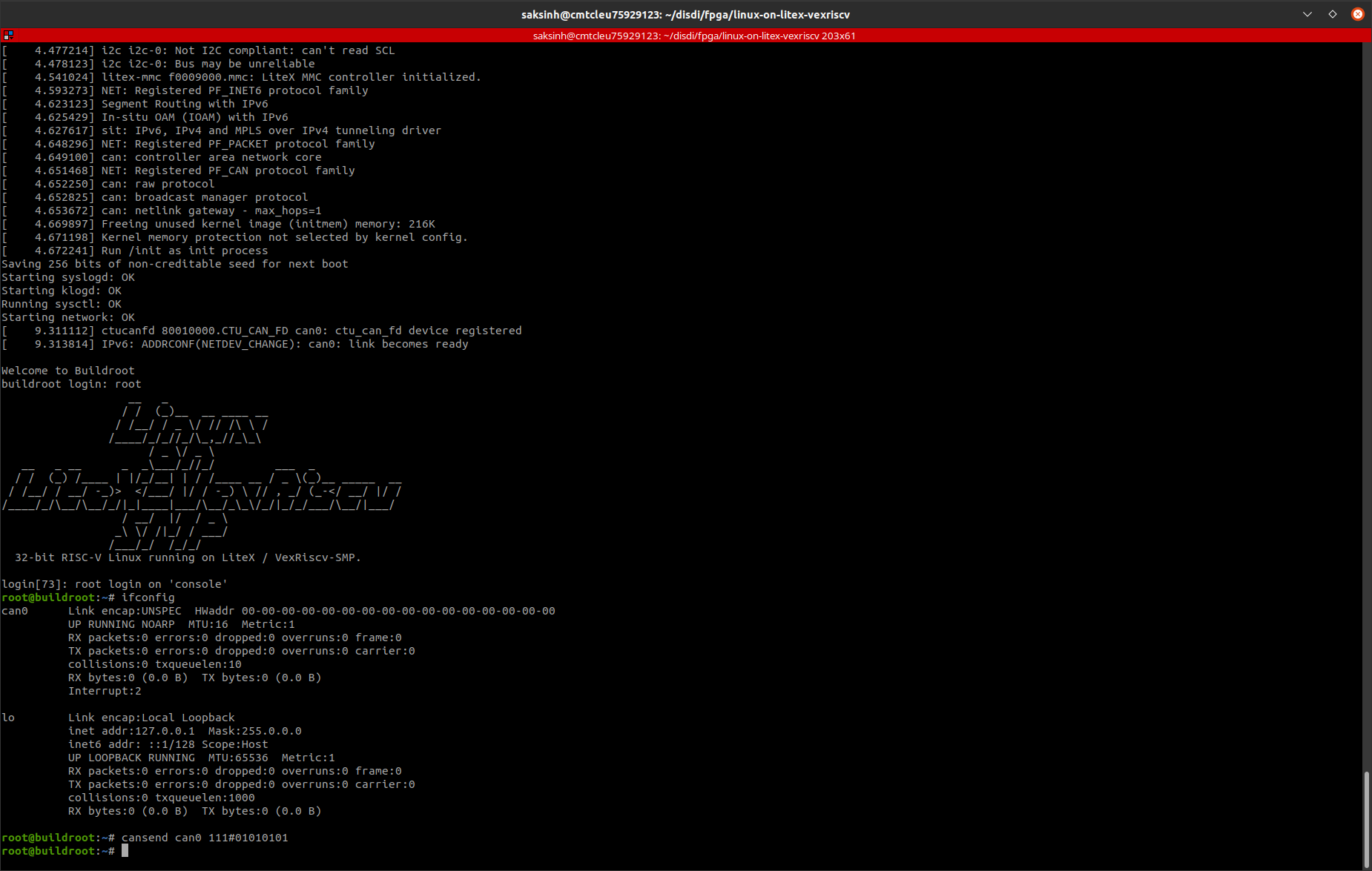
Communicate between Arty A7-100T and CAN device usinf cansend from can-utils package.